We finally reached midterm season!! These couple of weeks working on the midterm have been a test of efficiency and the importance of the iterative process that is the design process. Lets get in to it!
The first couple of tasks we had for the midterm was choosing a design and then demonstrating a sort of proof of understanding of the design we chose. This was done through a low/medium fidelity prototype or two or three. Then we had to build of this lower fidelity prototype for a final prototype.
I chose the design I started with from the adobe illustrator assignment a few weeks back, Mechanical Movement #269. The design consists of a mutilated rack, that as its been translated left and right will rotate a freely rotating gear clockwise and counter clockwise.
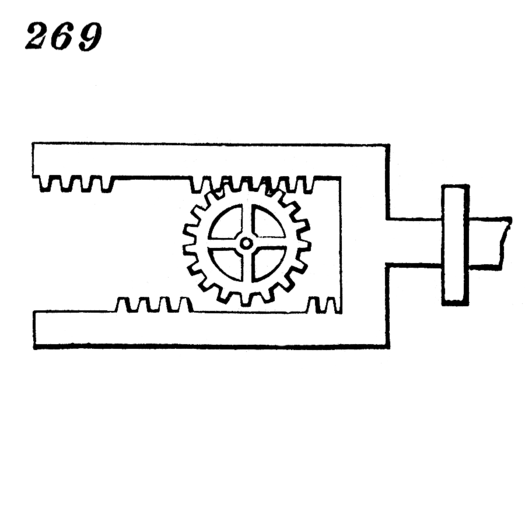
Figure 1: Mechanical Movement #269
For my lower fidelity prototype I wanted to showcase that my mechanism worked so I tested with a cardboard cut out of my gear, the mutilated rack, and the backboard holding those pieces together. The thing about cardboard cut out of gears is that they just don’t work. Therefore as a medium fidelity prototype I went ahead and cut the gear and the rack out of wood with the cardboard back piece and presented that.

Figure 2: Low Fidelity Prototype
After getting approval for medium fidelity prototype I started to think about what to make my metal piece to be. One idea that I got after discussing with Carlos and Dr. Wettergreen was the back board to be metal and a stand made out of wood with finger joints that would fit in the metal piece. I figured the one big worry for this idea was whether or not i can actually get a good fit for the finger joints (wood to metal) so I decided to plasma cut a metal piece and a laser cut with finger joints. The first run produced the result in Figure 3. because the kerf on the plasma cutter was large. I kept reiterating by re scaling the female end of the joints to no avail as I couldn’t re scale appropriately to get a good fit. For this reason I ditched the metal as a backboard and decided on making my stands out of metal.

Figure 3: Kerf on plasma cutter took to much off
I got the idea for the stands from a fellow classmate, Hannah, who suggested a lap joint at the bottom of an angled stand. The stands as well required iteration as the plasma cutter was cutting my piece oddly [IMAGE]. This was after making sure that the piece I was cutting from wasn’t warped which left me bamboozled as to why it came out like that. However I continued testing with base and fortunately enough I needed to iterate even more as the stands weren’t capable of holding my piece as the angle on the stand was a little too much. For my next iteration I decided on a thicker piece with a steeper angle. After plasma cutting I noticed that the lab joints weren’t cut accurately because they weren’t able to fit onto one another. This, I was able to fix using a dremel that allowed me to clean up the sloppy cut joints. After testing with a weight similar to my final prototype I went ahead and post processed by taking the dross off and sand blasting it to give it a machined finish.

Figure 4: Curved (?) plasma cut

Figure 5 : Final Plasma Cut Base, Thicker piece with dremeled snap joints for a better fit

Figure 6: Necessary dremeling for lap joints!
Then I was left with the rest of the enchilada, the Mechanism. This required even more iterations as I was experimented with taking off, adding, or chipping off teeth to give my free spinning gear a smoother motion. The medium fidelity prototype consisted of no chipped teeth with a spacing of two teeth in between the the top set of teeth and the bottom set. With each iteration after the medium fidelity where I experimented with the three options I listed for the teeth I would still notice that the motion for the gear was still not as smooth and at times even worse. Therefore I decided to revert back to the design from the medium fidelity prototype. This proved to be the driver, the translation motion of the mutilated rack, was pushed and pulled relatively quickly so as to make sure the gear is moving relatively faster.
One other improvement pointed out to me by Dr. Wettergreen and Carlos was the addition of walls attached to the backboard. These walls allow the translation of the rack to be entirely linear and keep it from wobbling. The wobbling in the medium fidelity we noticed was causing unnecessary strain on m middle gear hindering it from a smooth rotating motion.

Figure 5: Iterations!
After the many iterations of each design aspect I went ahead into assembling everything. With the time crunch I used my default gluing mechanism of hot glue which wasn’t the best course of action as it made the final prototype less appealing. At the end I ended up with a slightly warped everything after so many iterations (my very last iteration of my mechanism was, to my surprise, on warped wood) but the mechanism works pretty well so I’m proud of it. For the stand I could have glued it together with epoxy or some other glue instead of relying on the lap joints which didn’t have the best fit.

Figure 6: Final Piece!
Cost Analysis
Didn’t include machining used at OEDK
- Labor: $15/hr 20 hrs – $300
- Aluminum sheet- 12″ x 12″ of 0.125″ thickness $17.91. Used about 3 4″x4″ pieces of 0.125″ thickness ~$12.48
- 1/4″ Plywood: 2′ x 4′- $16.00 Home Depot, Used 40″x 28″ ~ $13
- Floor Marking Tape: 2″x 36yds. -$4.50 ULine, Used 2″260″ ~$1.00
Total: $325.48
I think this sum is on the reasonable end as the materials we used aren’t as costly therefore leaving most of the cost analysis for labor.
